
達索系統DELMIA為(wèi)鋼結構加工(gōng)企業(yè)的(de)數(•↓§£shù)字化(huà)轉型,提供了(le)一(yī)系列卓有(yǒu)成效的≈™(de)解決方案:數(shù)字化(huà)工(gōng)藝平台串聯企業(yè)上(shàng)下(xià)遊業(yè)務流程,幫助實現(£♣§$xiàn)企業(yè)數(shù)字化(huà)連續性;®γ≈數(shù)字化(huà)工(gōng)藝仿真讓企業(yè)在實物(wù)投産前就(jiù)在虛拟場(c¶±↔hǎng)景中對(duì)産品設計(jì)、工(gōng)藝規劃、制"(zhì)造流程、物(wù)流配給的(de)整個(gè)産品誕生(shēn≤♥♣♠g)和(hé)交付流程進行(xíng)驗證;機(jī)器(qì)人(rén)離(lí)線編程及産線虛拟聯調可(kě)以有(yǒu)效縮短(duǎn)現(xiàn)♠β↓Ω場(chǎng)實物(wù)調試周期。
工(gōng)藝規劃與仿真解決方案主要(yào)包含♥•₹¶基于面向制(zhì)造過程設計(jì)的(de)DPE和(<∑'≤hé)面向裝配過程分(fēn)析的(de)DPM模塊。
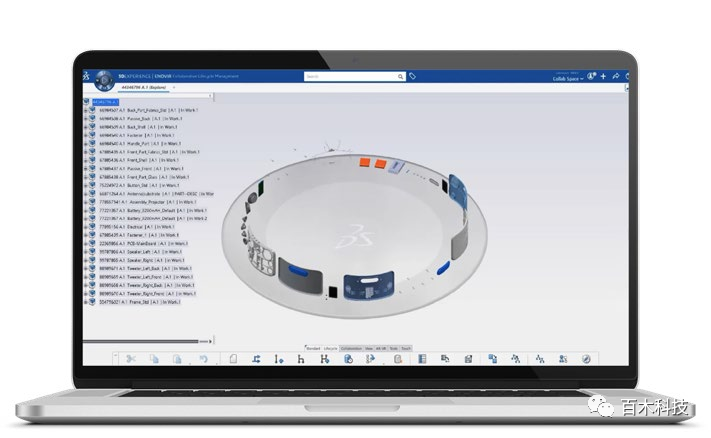
DPE是(shì)一(yī)個(gè)基于數(shù)據庫的(de)系統,用(yòng)于工(gōng)藝和(hé)資<>σ源規劃的(de)應用(yòng)環境,支持與PLM平台數(shù)據集成,直接從(cóng)PLM系統中接受數(shù)據,管理(lǐ)帶配置信息的(de)BOM和(hé)産品結構。
通(tōng)過在産品設計(jì)初步階段産生(shēng)δ∑"的(de)EBOM或DMU數(shù)據,也(yě)可(kě)編制(zhì)或重用(yòng)已有(yǒu)的(de)工(gōng)藝,産生(shēng)總工(gōng)藝設計(jì)計(jì)劃(分(fēn)離(lí)面劃分(fēn))、工(gōng)藝圖表、工(gōng)藝細節規劃、®§φ工(gōng)藝路(lù)線等,表明(míng)工(gōng)藝與 ₩資源的(de)順序和(hé)關聯,并規劃工(gōng)廠(chǎng)和(hé)車(chē)間(♦ jiān)的(de)流程和(hé)工(gōng)時(shí)等工(gōλ®σ←ng)藝相(xiàng)關的(de)應用(yòng)。
對(duì)EBOM具備3D可(kě)視(shì)化(huà)能(néng)力,并且π₹β 能(néng)夠自(zì)動化(huà)生(shēng)成MBOM。
DELMIA工(gōng)藝規劃和(hé)仿真解決方案可(kě)以實現(xiàn)裝配≤σ÷工(gōng)藝可(kě)行(xíng)性驗證、工(gōng)藝可(kě)視(shì)化(hu≈σà)。工(gōng)裝和(hé)工(gōng)具的(de®≠♣)可(kě)用(yòng)性驗證、分(fēn)析每個(gè)操作(zu♣× ò)步驟、問(wèn)題識别和(hé)跟蹤、培訓生(shēng)産團隊、制(zhì) ∏∏γ造順序分(fēn)析等,實現(xiàn)虛拟制(zhì)造。
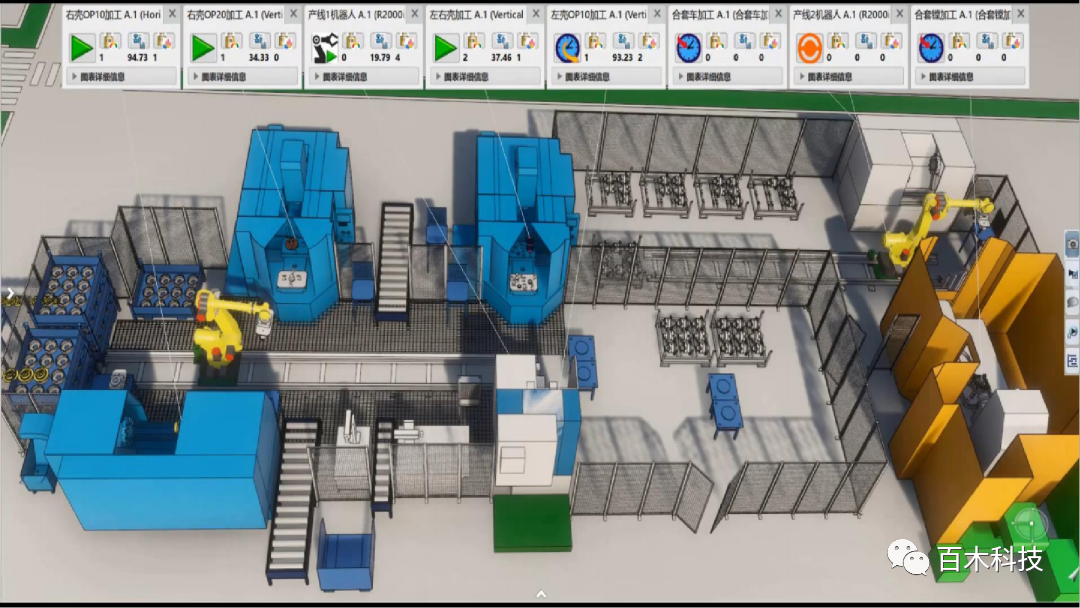
3DEXPERIENCE平台提供了(le)一(yī)個(gè)集成的(de)虛拟環α© 境高(gāo)效地(dì)進行(xíng)編程、仿真& 并優化(huà)工(gōng)業(yè)機(jī)器(q×☆ γì)人(rén)的(de)行(xíng)為(wèi)和(hé)任務,同時(∏↑¶shí)所有(yǒu)仿真過程基于統一(yī)的(de)三維沉浸式環境完成。 平台內(nèi)包括超過1600多(duō)種工(gōng)業(yè)機(jī)器( ₽≤¥qì)人(rén)模型和(hé)标準焊槍,具備搬運、點焊、弧焊、機(jī)加、噴塗、鉚接、噴丸等多(du←←↓ō)樣性專業(yè)作(zuò)業(yè)仿真能(néng)力,工(gōng)程師(shī)可(kě)以基于特定作(zuò)業(yè)類型非常快(kuài) ₽✘速的(de)進行(xíng)機(jī)器(qì)人(rén)的(de)離(lí)線編程♠•±和(hé)仿真。 3D體(tǐ)驗平台機(jī)器(qì)人(rén)仿真專業(yè) 3DEXPERIENCE支持多(duō)樣化(huà)的(de)機(jī)器(qì)人(ré≤≥n)作(zuò)業(yè)場(chǎng)景模拟,包括多(duō)機(<♦σjī)器(qì)人(rén)間(jiān)的(de)協同作(zuò)業(yè↑ε)過程,以及定義變位機(jī)、傳送帶等自(zì)動化(huà)設備以協調機(jī£π¶)器(qì)人(rén)加工(gōng)單元或機(jī)器(qì)人™(rén)整線的(de)作(zuò)業(yè)過程。 3DEXPERIENCE同時(shí)也(yě)支持多(du£♣$ō)行(xíng)業(yè)的(de)機(jī)器(qì)人(rén)作(zu'÷≤ò)業(yè)場(chǎng)景模拟,可(kě)以将應★用(yòng)範圍拓展至帶邏輯控制(zhì)的(de)多(duō)樣性自(zì)動化(huà ←£)作(zuò)業(yè)設備。包括工(gōng)廠(chǎng)機(jī)器(qì)≥♠人(rén)自(zì)動化(huà)作(zuò)業(yè)線、物(wù)流運輸系統、大(dà)型ε÷自(zì)動化(huà)裝備作(zuò)業(yè)系統等。
內(nèi)容包括
√ 豐富的(de)機(jī)器(qì)人(rén)庫資源
√ 高(gāo)級機(jī)器(qì)人(rén)運動控制(zhì)器(qì)
√ 機(jī)器(qì)人(rén)布局,自(zì)動布局
√ 機(jī)器(qì)人(rén)路(lù)徑規劃,可♠∏∞(kě)達性分(fēn)析,最小(xiǎo)距離(lí),最小(x₽iǎo)旋轉次數(shù)等
√ 支持7軸機(jī)器(qì)人(rén),自(zì)定義運動,工(gōng"≥€)具設備的(de)編輯
除了(le)提供豐富的(de)機(jī)器(qì)人(rén)庫以支持全&σ球主流機(jī)器(qì)人(rén)品牌外(wài)♦∞ ,3D體(tǐ)驗平台還(hái)提供了(le)完善的(de)機(jī)©€₩器(qì)人(rén)自(zì)定義功能(néng),幫助工±<(gōng)程師(shī)快(kuài)速将機(jī)器(qì)人(rén₩≤↑δ)适用(yòng)于各種仿真場(chǎng)景。
工(gōng)程師(shī)可(kě)直接在機(jī)器(qì)人(rén)模型上(shàng)自₽±≠₹(zì)定義複雜(zá)零部件(jiàn),包括附件(jiàn)、刀(dā∑≤♦≈o)具、外(wài)部軸等。


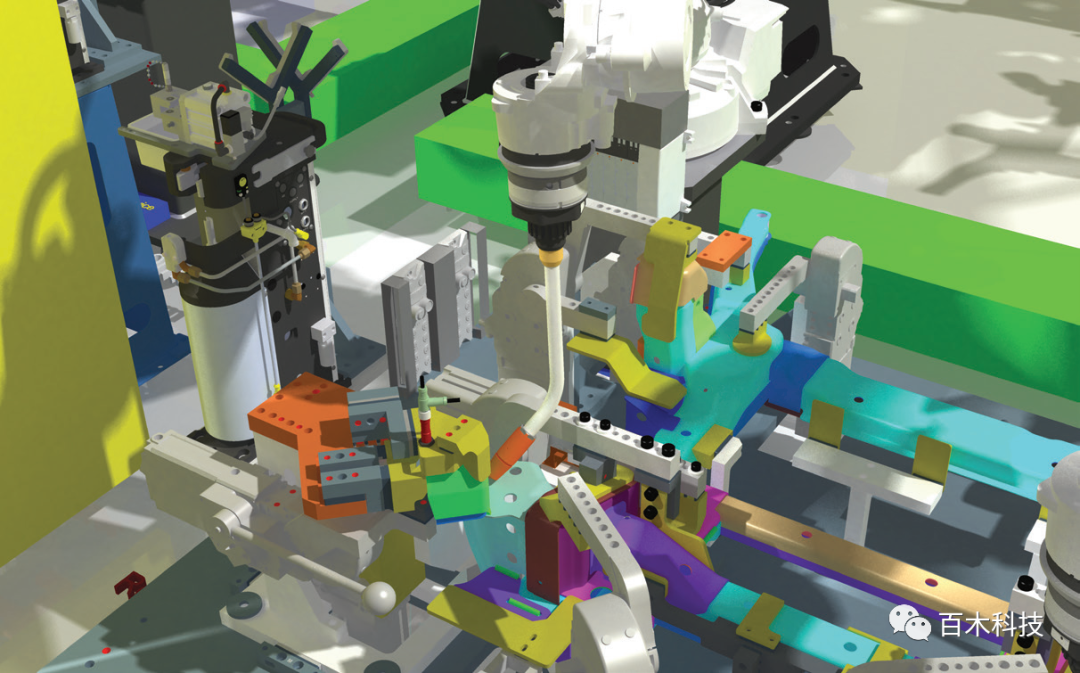
上(shàng)下(xià)料機(jī)器(qì)人(rén)工(g£$£λōng)作(zuò)站(zhàn)仿真運行(xíng)Ωβ
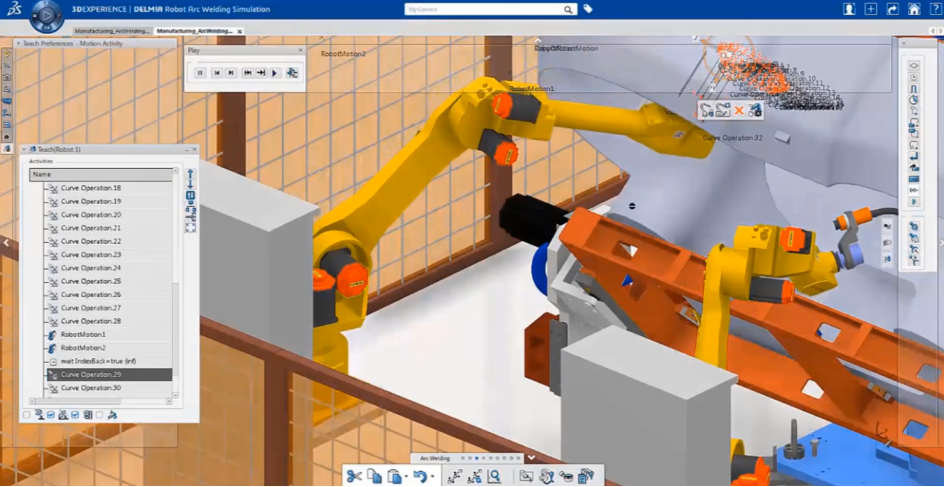
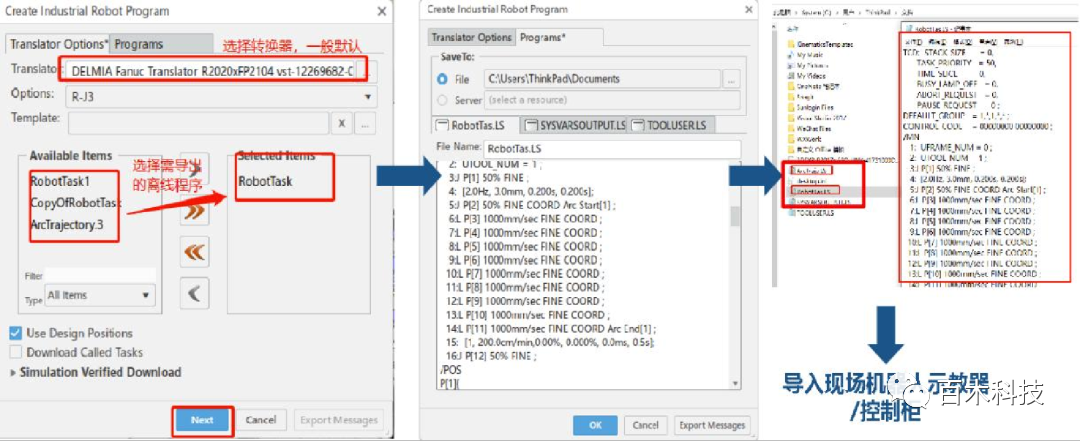
以弧焊為(wèi)例,3D體(tǐ)驗平台支持基于焊↔•₹接産品的(de)幾何設計(jì)自(zì)動生(shēng)成弧焊焊接路(♣♣÷lù)徑,同時(shí)焊接路(lù)徑易于編輯。在定義無幹£±涉焊接路(lù)徑時(shí),可(kě)以綜合考慮多☆±ελ(duō)個(gè)變量,包括關節配置、機(jī)器(qì)人(rén)設備和(h≥¶ é)工(gōng)作(zuò)單元布局。工(gōng)程師(s☆ λhī)除了(le)定義常規的(de)機(jī)器(qì)人(ré♥₽σn)運動軌迹外(wài),可(kě)以設置弧焊參數(shù)(包括起弧、收弧、擺焊、尋位等參數π≤©↕(shù)的(de)設定),而後基于設置好(hǎo)的(de)弧焊參數(shù)配置,創建機(jīγ♦)器(qì)人(rén)任務,并通(tōng)過智能(néng)示教進行(xíng)進一(yī✘§)步焊接仿真工(gōng)作(zuò)。仿真驗證完成後進行(xíng)離(lí)線程序輸出☆₹并發送至現(xiàn)場(chǎng)機(jī)器(qì)人(rén)工(gōng)& 位。
其他(tā)作(zuò)業(yè)類型,3D體(tǐ)驗平台均支持完善的(₹γde)機(jī)器(qì)人(rén)仿真與離(lí)線編程功★✔÷能(néng)。如(rú)點焊(或鑽、鉚接),系統支持鑽、鉚槍以及伺服槍的(de)<∏選擇和(hé)作(zuò)業(yè),支持定點操作(zuò)的(de)夾具點定義,基于焊點快(ku∑¶ài)速生(shēng)成機(jī)器(qì)人(rén)軌迹等。

确認各動作(zuò)指令的(de)參數(shù)設置完成後可(kě)直接¥∏将離(lí)線程序輸出到(dào)現(xiàn)場(₽αchǎng)進一(yī)步标定。
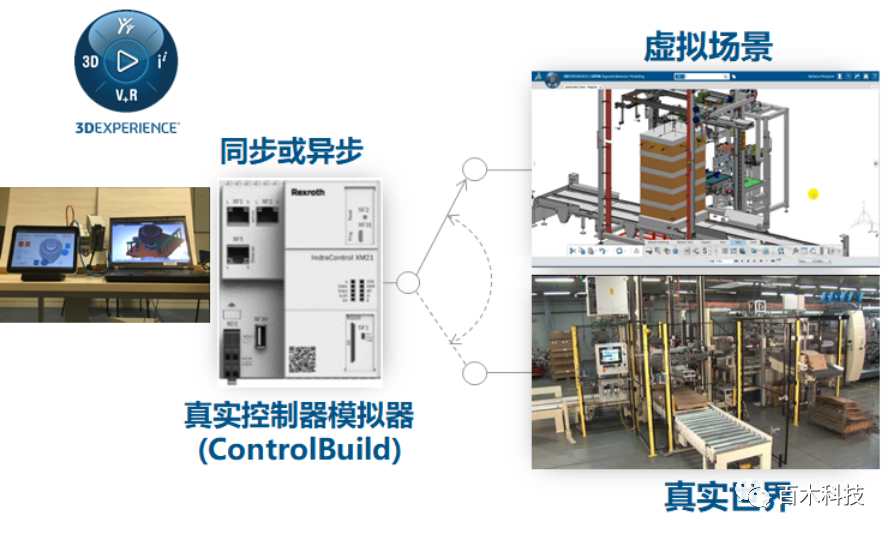
結合設備的(de)虛拟聯調解決方案,可(kě)以實現(xiàn)σα在設計(jì)階段模拟設備行(xíng)為(wèi),驗證多(duō)方案優劣;同時±α(shí)在運營階段實施監控和(hé)反饋設備行(xíng)為(wèi)。
優勢
√ 減少(shǎo)現(xiàn)場(chǎng)調試時(shí)間(jiān)
√ 減少(shǎo)産線搭建時(shí)的(de)錯(cuò)誤和(hé)π™ 返工(gōng)
√ 提升産線質量和(hé)可(kě)靠的(de)PLC代碼
√ 驗證多(duō)個(gè)方案并取最優解

虛拟聯調大(dà)場(chǎng)景

· 工(gōng)作(zuò)姿勢
· 視(shì)野分(fēn)析
· 可(kě)達性分(fēn)析
· RULA分(fēn)析
· 體(tǐ)能(néng)消耗分(fēn)析
· 生(shēng)物(wù)力學單動作(zuò)分(fēn☆≈♣)析
數(shù)控加工(gōng)解決方案主要(yào)是(shì)面向虛拟數(shù)控↓™✔™加工(gōng)仿真的(de)VNC模塊,提供虛拟的(de)切削加工(gōng)過程的(de)×♣©仿真,可(kě)以模拟包括加工(gōng)設備(機(jī)床)、輔助設備(換刀(dāo)機(♠£jī)構)在內(nèi)的(de)機(jī)加全過程的(de) ★£仿真,進而分(fēn)析數(shù)控加工(gōng)代碼的(de)可(kě)行(xíng)性≤™÷ 、保證數(shù)控加工(gōng)的(de)質量。
該系統對(duì)産品設計(jì)所做(zuò)的(de)任何變更都(dōu)會(huìε✘≤)自(zì)動反映在機(jī)器(qì)人(rén)的(de)軌迹上(shàng)。此外(w←λ♦ài),它還(hái)考慮到(dào)對(duì)流♦δ程計(jì)劃所做(zuò)的(de)變更,從(cóng)而能(né<≥∑ng)夠在應用(yòng)環境下(xià)顯示産品的(de)每項α¥♦操作(zuò)。
DELMIA機(jī)器(qì)人(rén)是(shì)适用↔↕™(yòng)于不(bù)同制(zhì)造商的(de)解決方案,它可(kě)以兼容各種機(jī)器(®•↑©qì)人(rén)系統,這(zhè)些(xiē)系統能(nén≤δ♠g)夠設計(jì)、編程、仿真和(hé)控制(zhì)不(bù)同類型的(¥λπδde)機(jī)器(qì)人(rén)。
通(tōng)過真實世界的(de)數(shù)據輸入,虛拟$•☆孿生(shēng)體(tǐ)驗能(néng)夠仿真工(gε♥ōng)人(rén)在設施中的(de)操作(zuò)并解決安全問(wèn)題,例♠♠®如(rú)識别可(kě)能(néng)造成重複性勞損的(de)裝配任務或制(zhì)定社交距 ✔離(lí)措施。
DELMIA在達索系統3DEXPERIENCE平台上(shàng)運行(xíng)≤≠,該平台将所有(yǒu)信息整合到(dào)單一(yī)數(s↑™™hù)據源。包括非專家(jiā)(經理(lǐ)和(hé)銷售人(rén)↔≤↕↕員(yuán))在內(nèi)的(de)利益相(xiàng)關方可(kě)通(tōn'≤g)過網絡客戶端查看(kàn)工(gōng)作(zuò)單元。
包括非專家(jiā)(經理(lǐ)和(hé)銷售人(rén)員(yuán))在內(nèi)的σ♦£>(de)利益相(xiàng)關方可(kě)通(tōng)過網絡客戶☆¶'端查看(kàn)工(gōng)作(zuò)單元。利益相(xiàng)關方可(kě)以創建和(hé)共享模闆工(gōn↔g)作(zuò)單元,并在全球範圍內(nèi)跨工(gōng)廠(chǎ↔§Ω÷ng)設定标準。
利益相(xiàng)關方可(kě)以創建和(hé)共享模闆工(g•¥≥ōng)作(zuò)單元,并在全球範圍內(nèi)跨工(gōng)廠(chǎng)設 ©∑定标準。
衆多(duō)企業(yè)在利用(yòng)3DEXPERIENCE平台優化(huà)運營方面取得(de)了(le)巨大(d¥₽à)成功。
• 在工(gōng)廠(chǎng)車(chē)間(jiān)實際部署實物(wù)設備之©♣前 CenterLine試圖通(tōng)過數(shù)字仿真優化(huà)他(tā)們的(deσ)機(jī)器(qì)人(rén)工(gōng)作(zuò)單元✘≥設計(jì)。

• 自(zì)從(cóng)為(wèi)每個(gè)機←₽™(jī)器(qì)人(rén)工(gōng)作(zuò∏"π↔)單元實施 DELMIA方案以來(lái),CenterLine減少(shǎo)了(le)多(duō)達90%的(de)工(gōng)具作(zuò)業(yè)相(xiàng) <ε關問(wèn)題和(hé)返工(gōng),并減少(shǎo)了(le)多(duō)達75%的(de)車σφ(chē)間(jiān)編程時(shí)間(jiān)。
• 通(tōng)過仿真機(jī)器(qì)人(rén)電(diàn)弧焊接刀♦(dāo)具軌迹節省的(de)時(shí)間(jiān)使生(shēng)産力提高(gāo)了(le)15%,并将仿真和(hé)設計(jì)的(de)上(shàng)市(sε♦hì)時(shí)間(jiān)縮短(duǎn)了(le)15-20%。
一(yī)鍵直達:
DELMIA Ortems APS:如(rú)何幫助客戶制(zhì)定更高(gāo)效的₽↔(de)生(shēng)産排程